KAI artefacts
This page provides an inventory of digital artefacts produced by the KAI group, categorized into Prototypes, Tools, Datasets, and Other. Browse the different categories to find specific items of interest.
-
Tools
-
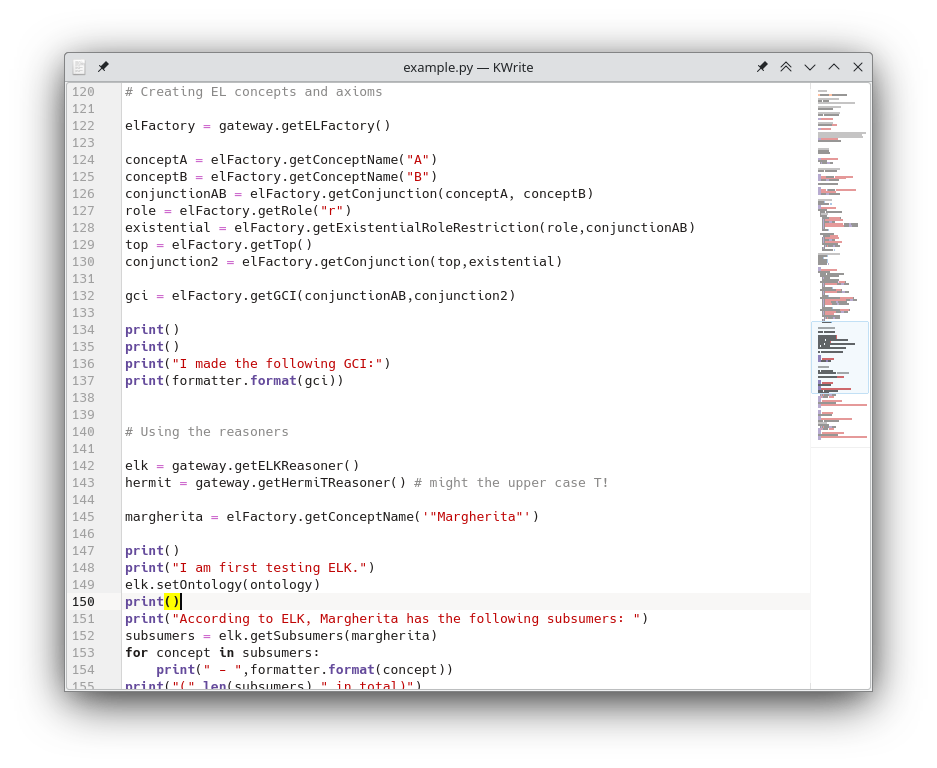
dl-lib - Working with Description Logics in Python and Scala
Simple library to work with description logic ontologies from python or scala, without having to learn about OWL terminology. All classes and method names use DL terminology, though one can parse and export to OWL ontologies. (more information)
- Library
- OWL
-
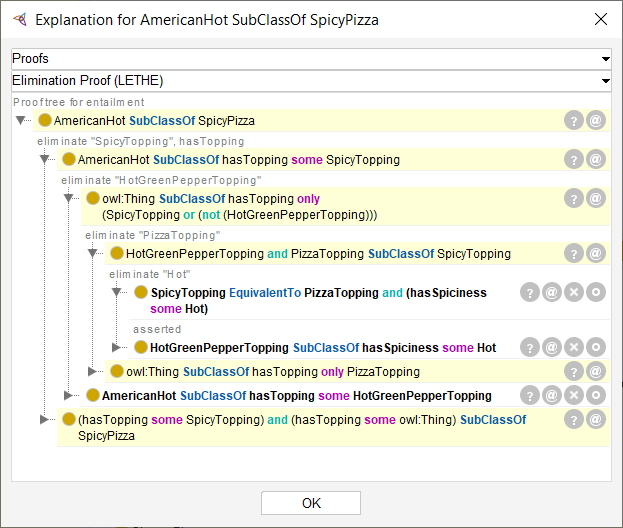
EVEE - Evincing Expressive DL Entailments
Evee is a Java library that comes with a collection of plugins for the OWL ontology editor Protege to explain inferences performed by a reasoner. To understand why something was derived through reasoning, Evee shows proofs with user-chosen level of detail. To understand why something was not derived by the... (more information)
- Ontologies
- Explanations
- Abduction
-
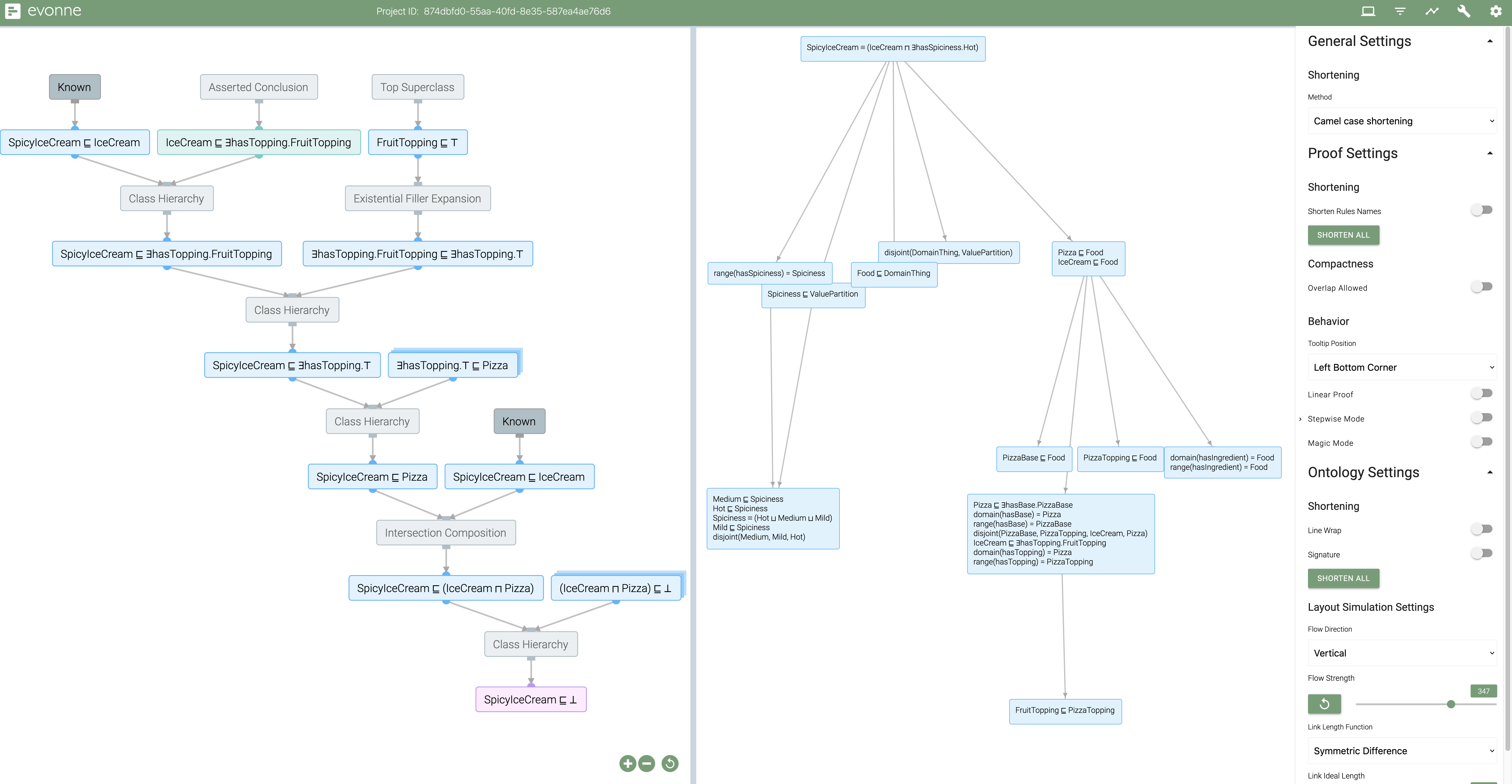
EVONNE
Evonne is a powerful web application for explaining entailments from ontologies. These entailments are explained using proof trees, for which we offer a range of navigation possibilities to explore these inferences. This can be used to better understand reasoning result from an ontology, but it can also be used for... (more information)
- Ontologies
- Explanations
-
GeMO - Extracting General Modules for ALC Ontologies
This is a tool for extracting knowledge from an ontology that is relevant for a specified signature of concept and role names (classes and object properties). The term "general module" generalizes the notions of uniform interpolation and classical modules. In particular, given a signature and an ontology, GeMO computes a... (more information)
- Ontologies
- Modularity
-
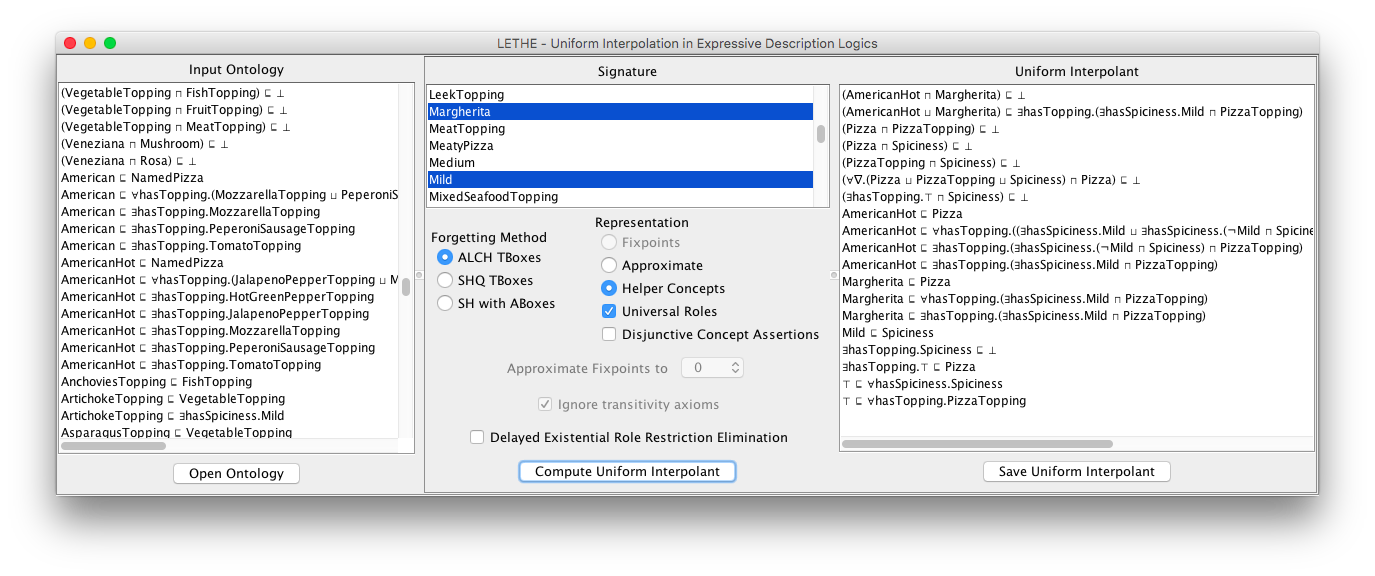
LETHE and LETHE-abduction
Uniform interpolation, forgetting and signature-based abduction for expressive description logics. Comes with a graphical front-end, but can also be used from the command line or as java library. (more information)
- Ontologies
- Modularity
- Ontology Evolution
- Abduction
-
-
Prototypes
-
Ontology Mediated Planning Prototype
This prototype implements our ontology-mediated planning framework which allows to integrate OWL ontologies with PDDL programs for automated planning. (more information)
- Ontologies
- Automated Planning
- Robotics
-
-
Datasets and Ontologies
-
The HI ontology
The Hybrid Intelligence Ontology is a high level ontology which allows to describe and compare Hybrid Intelligence scenarios, by providing a formal way to represent the scenario characteristics, the participating actors and their interaction. Link to the Thesaurus: https://github.com/kai-vu/Hybrid-Intelligence-Thesaurus/blob/main/hi-thesaurus.ttl (more information)
- Ontology
- Hybrid Intelligence

-
The OntoBOT ontology
OntoBOT is a modular OWL ontology that formally represents the elements of task execution for service robots. It supports reasoning about capabilities, environments, and affordances, bridging symbolic task descriptions with physical feasibility to enable context-aware, actionable robot behavior. (more information)
- Ontology
- Personal service robotics
- Knowledge representation
-
CoPla - the Companion Planting Ontology
This repository contains the Companion Planting Ontology, a resource developed by the Knowledge in AI group of Vrije Universiteit Amsterdam, for the purpose of understanding and implementing companion planting strategies in agriculture. (more information)
- Ontology
- OWL
- Agriculture
-
TIDO - The Threat Intelligence Decision Ontology
The TIDO ontology is designed to support a Threat Intelligence analyst in their decision making, while simulataniously creating a decision trace that allows for detailed post-analysis, limiting the need for ad-hoc decision reconstructions. (more information)
- Ontology
- Decision Making
- Threat Intelligence

-
-
Other
-
Bridging Bots: From Perception to Action via Multimodal-LMs and Knowledge Graphs
This project explores how neural models and symbolic reasoning can be combined for service robots to interpret complex environments and plan actions. It integrates Webots simulations, natural language task descriptions, multimodal LLMs, and ontology-based reasoning. A runnable Jupyter notebook is available at https://github.com/kai-vu/euRobin/tree/main/august2025/scripts. (more information)
- Neurosymbolic AI
- Personal service robotics
- Ontology-based reasoning
- Multimodal large language models
-